How to connect the HAT
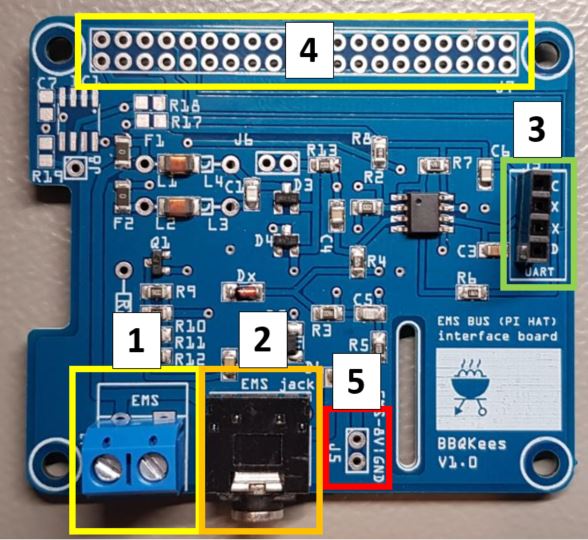
Available connectors on the board
Number |
Function |
Remark |
|---|---|---|
1 |
EMS screw terminal |
Polarity does not matter. |
2 |
EMS service jack plug |
Only connect either screw or jack terminal. |
3 |
UART header |
VCC/TX/RX/GND. Input 5V or 3.3V from controller. This is a general purpuse UART header when you are not using the board as a Pi HAT. |
4 |
Raspberry Pi header |
|
5 |
8~16V pin from EMS service jack |
Left pin EMS 8~16V DC. Right pin GND. Max power draw 200mA cont. |
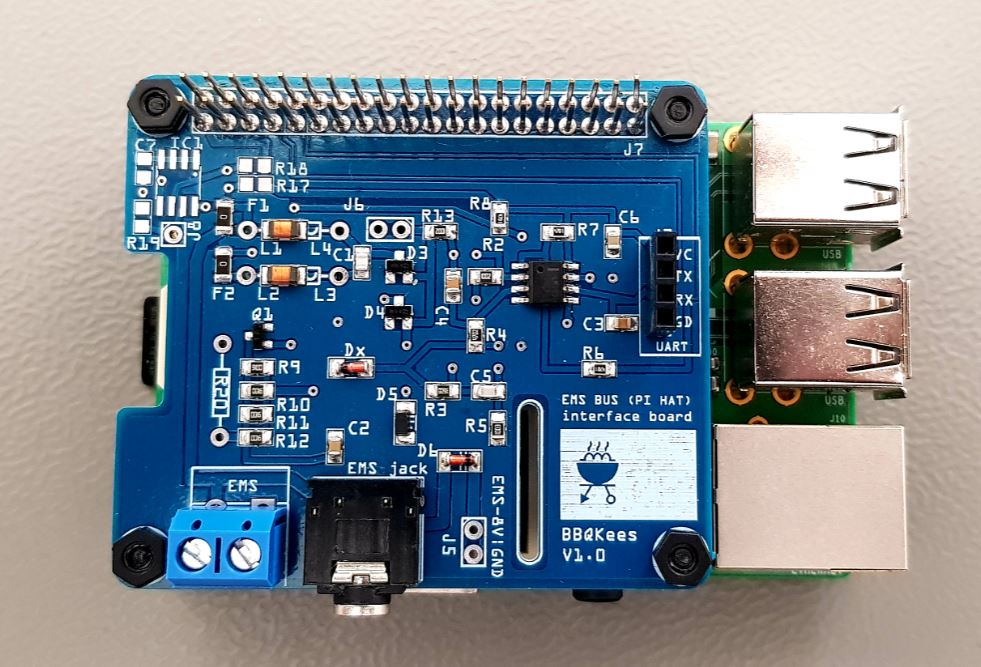
Connecting to the Raspberry Pi
You can just insert the board onto the 40-pin Raspberry Pi header. Thats it.
Depending on the case you are using you need to mount the included set of standoff spacers as well.
Of course you also need to power the Raspberry Pi itself via a 5V adapter. The HAT gets its power via the Pi header. So no external source needed. Connect the Pi to your network via Ethernet or Wi-Fi.
Warning
Do NOT connect the UART header to another device when the HAT is on a Raspberry Pi!
Stacking header
The 40-pin header on the board is a stacking header. This means you can connect multiple HAT modules to the same Pi.
This HAT does not make use of the HAT auto-config EEPROM so it does not interfere with other HATs that might have one. Aside from 3.3V and GND, it connects only to GPIO14 and GPIO15 which are the TX and RX pins of the Pi.
Because the stacking header is quite high, the board sits about 14mm above the Pi circuit board.
Connecting to other microcontrollers
Aside from the Raspberri Pi, this HAT is also compatible with other 3.3V and 5V UART serial ports of various microcontrollers like the Arduino and ESP8266. You can connect those the UART header on the board.
Do NOT connect the UART header to another device when the HAT is on a Raspberry Pi!
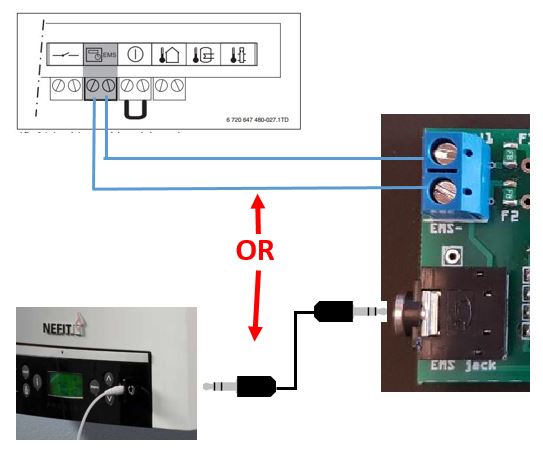
Connecting to the EMS bus
You can use EITHER the EMS bus service jack OR the screw terminal. Do not connect them at the same time, because you might short circuit the bus. If you use the screw terminal, polarity does not matter because the circuit bord corrects both orientations.